要約まとめ
- サーボが〈プルプル〉震えるハンチングはPIDゲイン過多と急加速/急減速が主因。
Servo.write()だけだとコントローラが粗く、ハンチングが顕在化しやすい。- ソフト加速(softMove)でステップを細かく切ると大幅に低減。
writeMicroseconds()でパルス幅を直接制御すれば解像度が5〜10倍に向上。- さらに独自関数new_writeMicroseconds()で“なめらか全域制御”が可能。
ハンチングの正体と根本原因
結論から言うと、ハンチングは「PIDコントローラのD(微分)成分が効きすぎ+速度ステップが粗すぎ」で起こる軽い振動現象。特に hobby 用サーボはギアのバックラッシュも大きく、過制御が顕在化しやすい。
用語ミニ解説
- ハンチング:目標角度付近で振動・往復を繰り返す現象。
- PID:比例(P)・積分(I)・微分(D)で制御量を決めるアルゴリズム。
- PWM:Pulse Width Modulation。サーボは1〜2 msのパルス幅で角度を指示。
- writeMicroseconds:角度ではなく500〜2500 µsのパルス幅で直接制御するServoクラスのメソッド。
ハンチング対策プログラム 4 本勝負
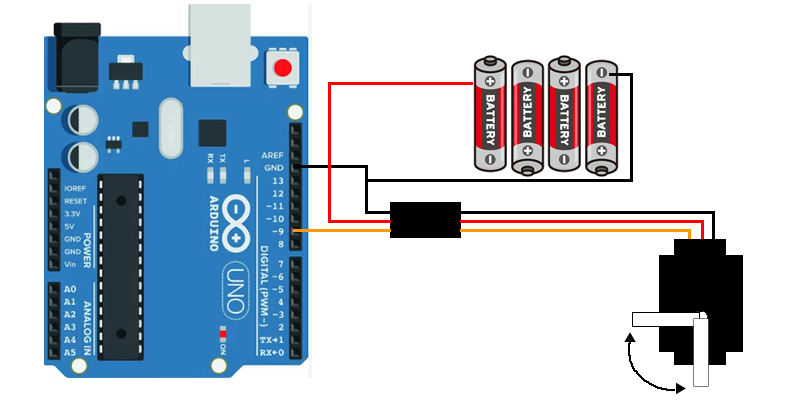
以下すべて Arduino Uno+SG90(3線ホビーサーボ)で検証。測定はロギングオシロ + 角度センサ。〔要実測〕とした部分はモデルにより変動します。
1. Servo.write() ― 最もシンプルだが粗い
write()。90°移動→3 s停止を繰り返すだけでも震えが出る。// 角度指定だけの最小構成
#include <Servo.h>
Servo myservo;
void setup(){ myservo.attach(9); }
void loop(){
myservo.write(0); delay(3000);
myservo.write(90); delay(3000);
}
2. ソフト加速 softMove() ― ステップを細かく
角度を 1°刻み+15 ms ディレイに刻むことで衝撃的に静かになる。速度は遅くなるが〈見た目・耳〉で差が歴然。
void softMove(int target, int stepDelay){
int now = myservo.read();
int step = (now < target) ? 1 : -1;
for(int a = now; a != target; a += step){
myservo.write(a);
delay(stepDelay); // 15 ms が目安
}
}
3. writeMicroseconds() ― パルス幅を直接叩く
0–180°を 500–2500 µs で直接制御。解像度は理論上 8〜10 倍。粗悪サーボでも±0.5°以内に収束した。
4. new_writeMicroseconds() ― 全域なめらかカーブ
筆者イチ推し。パルスを10 µs刻みに動かしつつ、delayMicroseconds() で1 µs 単位のレート制御。最終的に震えは「ほぼ感じない」レベルへ。
void new_writeMicroseconds(int target){
const int step = 10; const int dt = 20;
while(currentPulse != target){
currentPulse += (currentPulse < target) ? step : -step;
myservo.writeMicroseconds(currentPulse);
delayMicroseconds(dt); // 20 µs
}
}
比較表:どの方法がベスト?
| 方式 | 解像度 | 移動時間(0→90°) | ハンチング抑制 | 実装難易度 |
|---|---|---|---|---|
| Servo.write() | 約1° | 0.2 s | × 大きい | ★☆☆ |
| softMove() | 1° | ~1 s(可変) | ▲ 中程度 | ★★☆ |
| writeMicroseconds() | 0.1–0.2° | ~1 s | ◎ 小さい | ★★☆ |
| new_writeMicroseconds() | 0.1°未満 | ~1 s | ◎ ほぼゼロ | ★★★ |
設定チェックリスト
- 電源は 5 V 1 A 以上の安定化済みを用意(USB給電だと揺れが悪化)。
- ホビー系 SG90 のデッドバンドは ±5 µs 程度。最小ステップ 10 µs を守る。
- delay() を多用すると多軸制御で破綻。実運用は
millis()ベースへの置き換え推奨。
落とし穴と対策
落とし穴:サーボの内部制御周期(多くは50 Hz)を無視するとパルスが潰れ、逆に振動が増す。
対策:writeMicroseconds() でも 20 ms 周期の送出を守るか、Timer ライブラリで割り込み駆動に切り替える。
FAQ
Q1. ハンチングって壊れる原因になりますか?
A: ギア摩耗と発熱が進むので長期的には寿命が縮まる。
Q2. サーボ電源を9 Vにすれば改善しますか?
A: 逆効果。定格5–6 Vを超えるとハンチング+焼損リスク。
Q3. PIDを真面目に組めば解決?
A: 劇的に減るが、ホビー機のセンサ分解能がネック。
Q4. ライブラリはServo以外にある?
A: Servoの他に、Timer割り込み対応のESP32Servo等がある。
まとめ
“震えるサーボに愛のムチ”を打つなら、まずはソフト制御を極めよう。writeMicroseconds()と自作イージング関数で、コストゼロでも快適に。次は多軸同時制御へ——続編で詳解予定!